面向汽车工业复杂场景的分拣机器人设计 说明书(论文) 任务书 开题报告 答辩答辩ppt 毕业答辩稿 毕业答辩ppt cad图纸 sw三维图 论文检测查重报告-九游会j9登录
本选题源于汽车工业对高效、精准分拣技术的持续追求。随着汽车产业的快速发展,对自动化、智能化生产线的需求日益迫切。特别是面对复杂多变的分拣场景,传统的人工分拣方式已难以满足生产效率和精度的要求。因此,本课题致力于设计一款面向汽车工业复杂场景的分拣机器人,通过深入研究其机械臂的主体结构,实现自动化、高效化的零件抓取与分拣,以推动汽车工业的智能化发展,提高生产效率,降低人工成本。
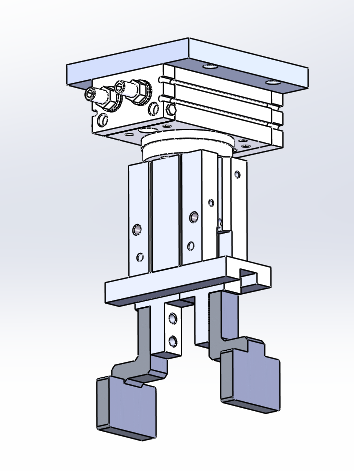
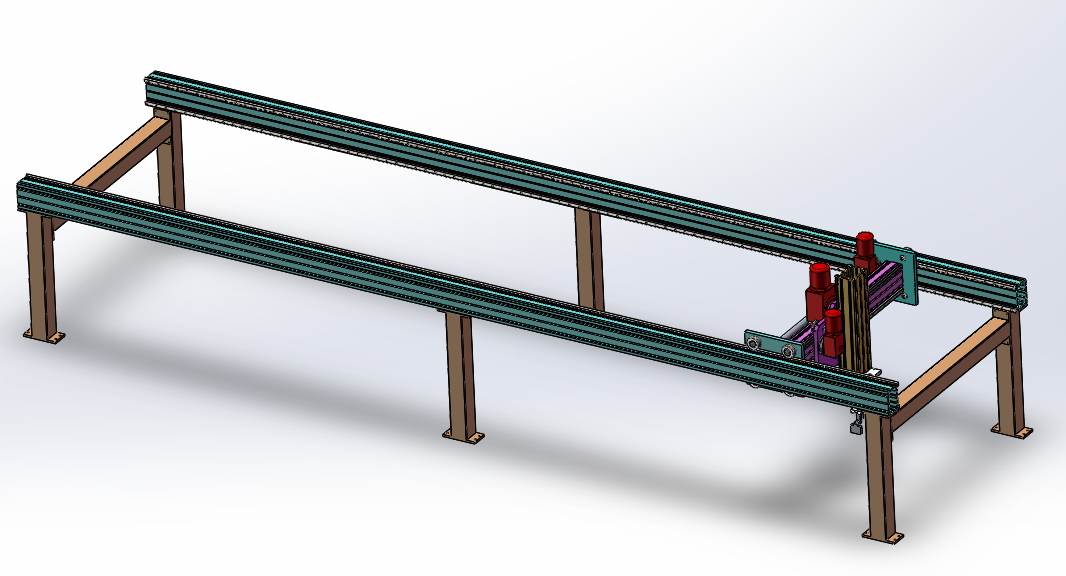
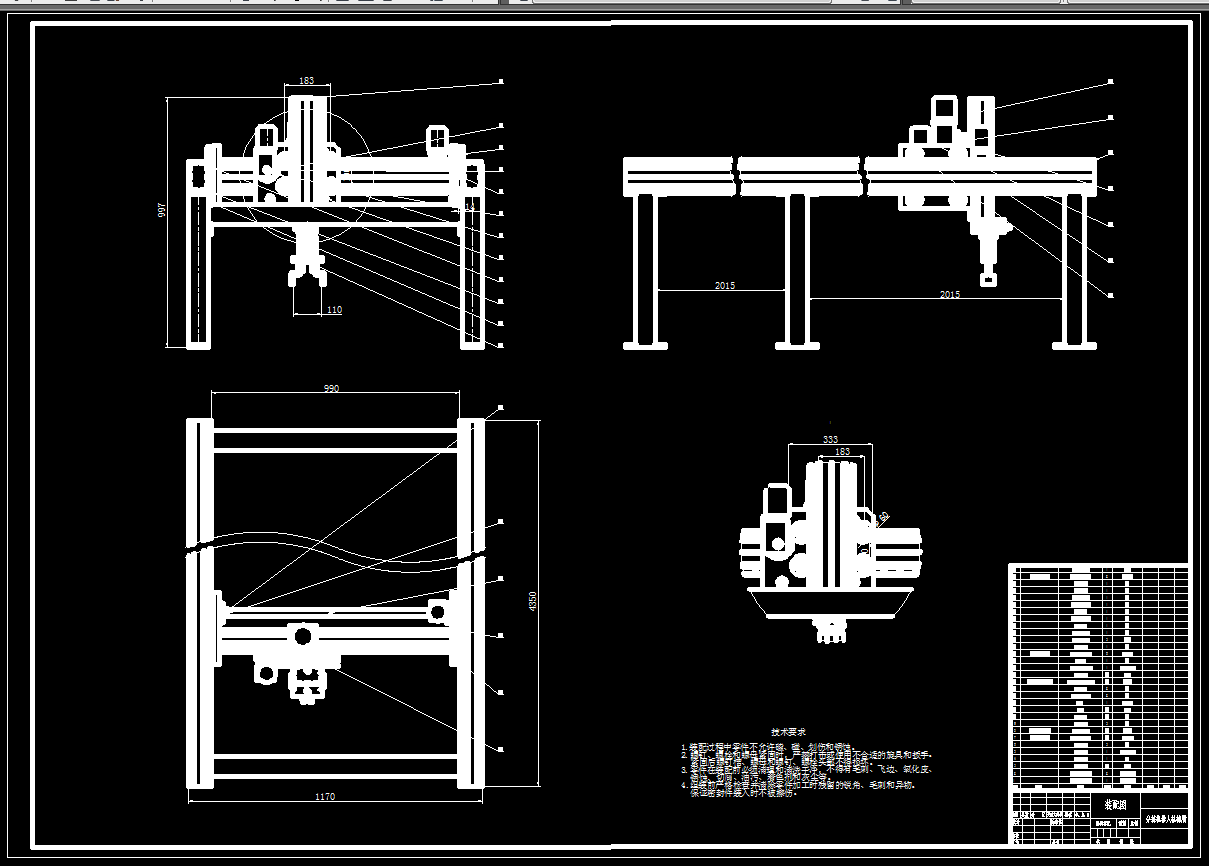
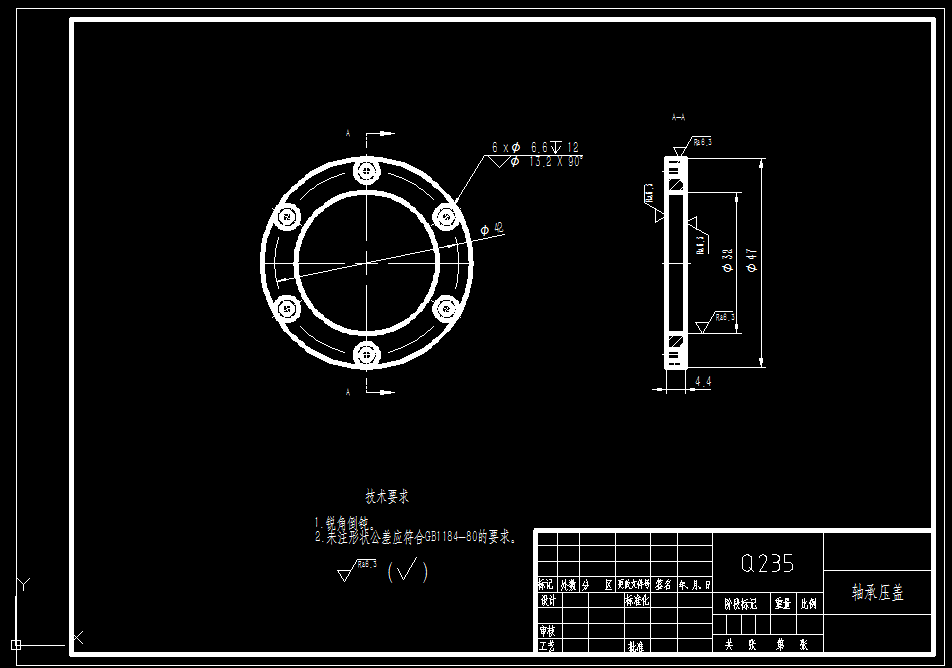
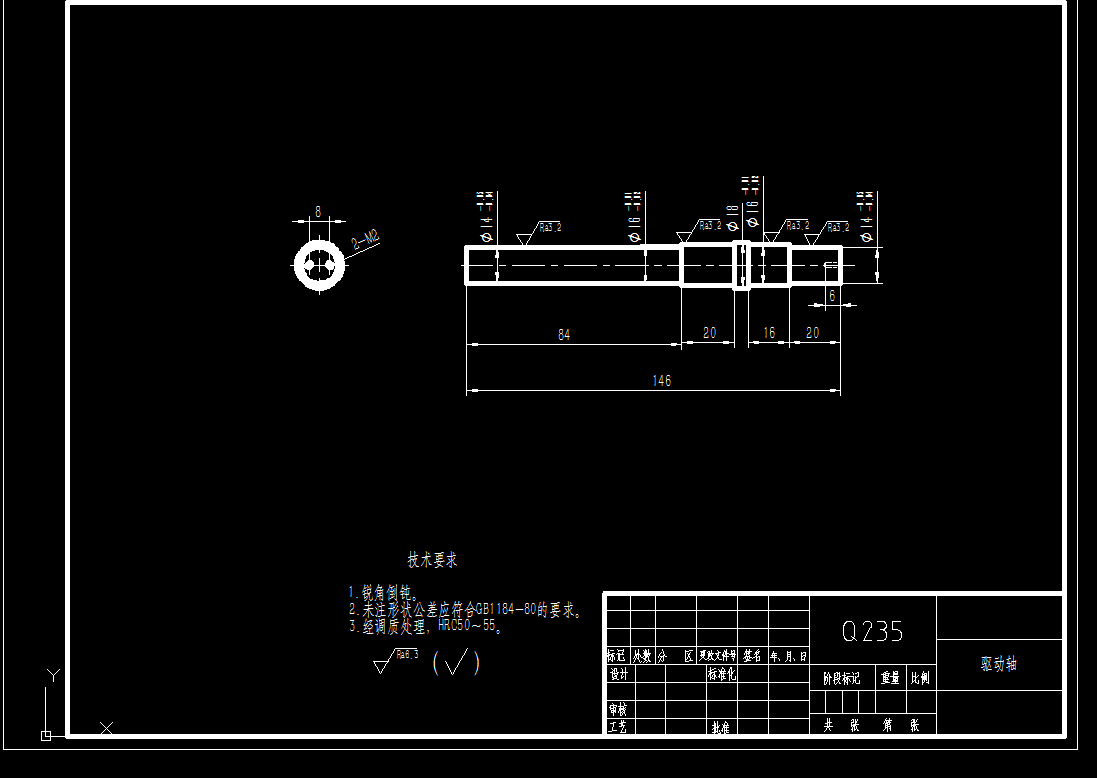
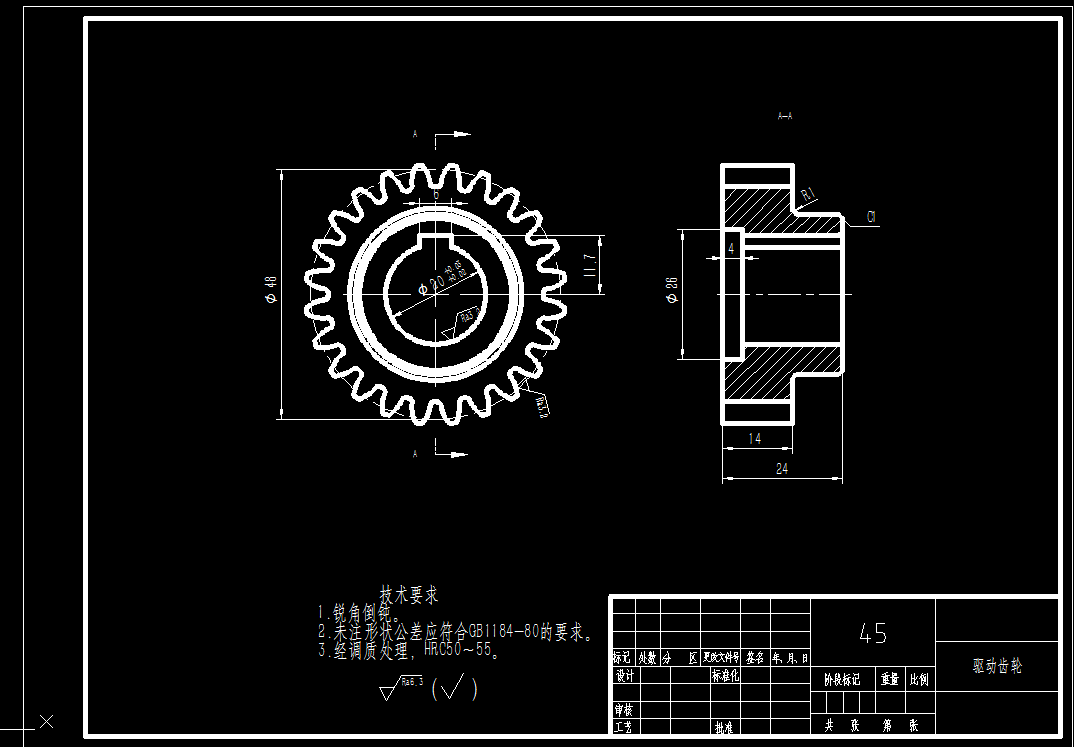
本文旨在设计一款面向汽车工业复杂场景的分拣机器人,重点研究其机械臂的主体结构。分拣机器人机械臂具备大行程、高强度特性,能够实现三个方向上的移动,并采用标准的smc气爪进行零件抓取与分拣。针对移栽过程中的旋转需求,通过程序控制旋转气缸实现设定角度的旋转。本文利用solidworks软件完成机械臂的结构设计与三维建模,将各个零件装配成整体,并转化为二维图纸。论文详细阐述了主要结构的形式、轮子样式设计、轴承选取及轴上键的校核等内容。此外,对机械臂的运动仿真分析、驱动与传动方式的确立进行了深入研究,并输出了关键部位的工程图纸。本设计不仅提升了分拣机器人的工作效率与稳定性,也为未来复杂场景下的自动化分拣提供了技术参考。
关键词:分拣机器人;机械臂设计;solidworks建模;运动仿真;驱动与传动方式
this topic is derived from the automobile industry's continuous pursuit of efficient and accurate sorting technology. with the rapid development of the automobile industry, the demand for automation and intelligent production line is increasingly urgent. especially in the face of complex and changeable sorting scenarios, the traditional manual sorting method has been difficult to meet the requirements of production efficiency and accuracy. therefore, this project is committed to the design of a sorting robot for the complex scene of the automobile industry. through in-depth research of the main structure of its mechanical arm, automatic and efficient parts grasping and sorting, so as to promote the intelligent development of the automobile industry, improve production efficiency and reduce labor costs.
this paper aims to design a sorting robot for the complex scene of the automobile industry, focusing on the main structure of its mechanical arm. the sorting robot arm has the characteristics of large stroke and high strength, and can move in three directions, and uses the standard smc air claw for part grasping and sorting. according to the rotation requirements during transplanting, the rotation cylinder is controlled to realize the rotation at the set angle. in this paper, solidworks software is used to complete the structural design and 3 d modeling of the mechanical arm, and then each part is assembled into a whole and transformed into two-dimensional drawings. the paper elaborated the form of the main structure, wheel style design, bearing selection and the key on the shaft. in addition, the motion simulation analysis of the mechanical arm, the establishment of the drive and the transmission mode are deeply studied, and the engineering drawings of the key parts are output. this design not only improves the working efficiency and stability of the sorting robot, but also provides a technical reference for the automatic sorting in complex scenarios in the future.
key words: sorting robot; mechanical arm design; solidworks modeling; motion simulation; drive and transmission mode
目 录
目录
摘 要
abstract
目 录
第1章 绪论
1.1 选题背景及意义
1.1.1选题背景
1.1.2选题意义
1.2 国内外研究现状及发展趋势
1.2.1 国内研究现状
1.2.2 国外研究现状
1.2.3 发展趋势
1.3 主要研究内容及方法
1.3.1研究内容
1.3.2研究方法
第2章 分拣机器人自动分拣系统总体方案设计
2.1 设计方案选择与对比分析
2.2 分拣对象确定与识别技术
2.3 总体方案确定
2.4 分拣系统安全保护措施
第3章 机械臂运动组件的设计
3.1分拣机器人构架的设计
3.3.1立柱的结构设计
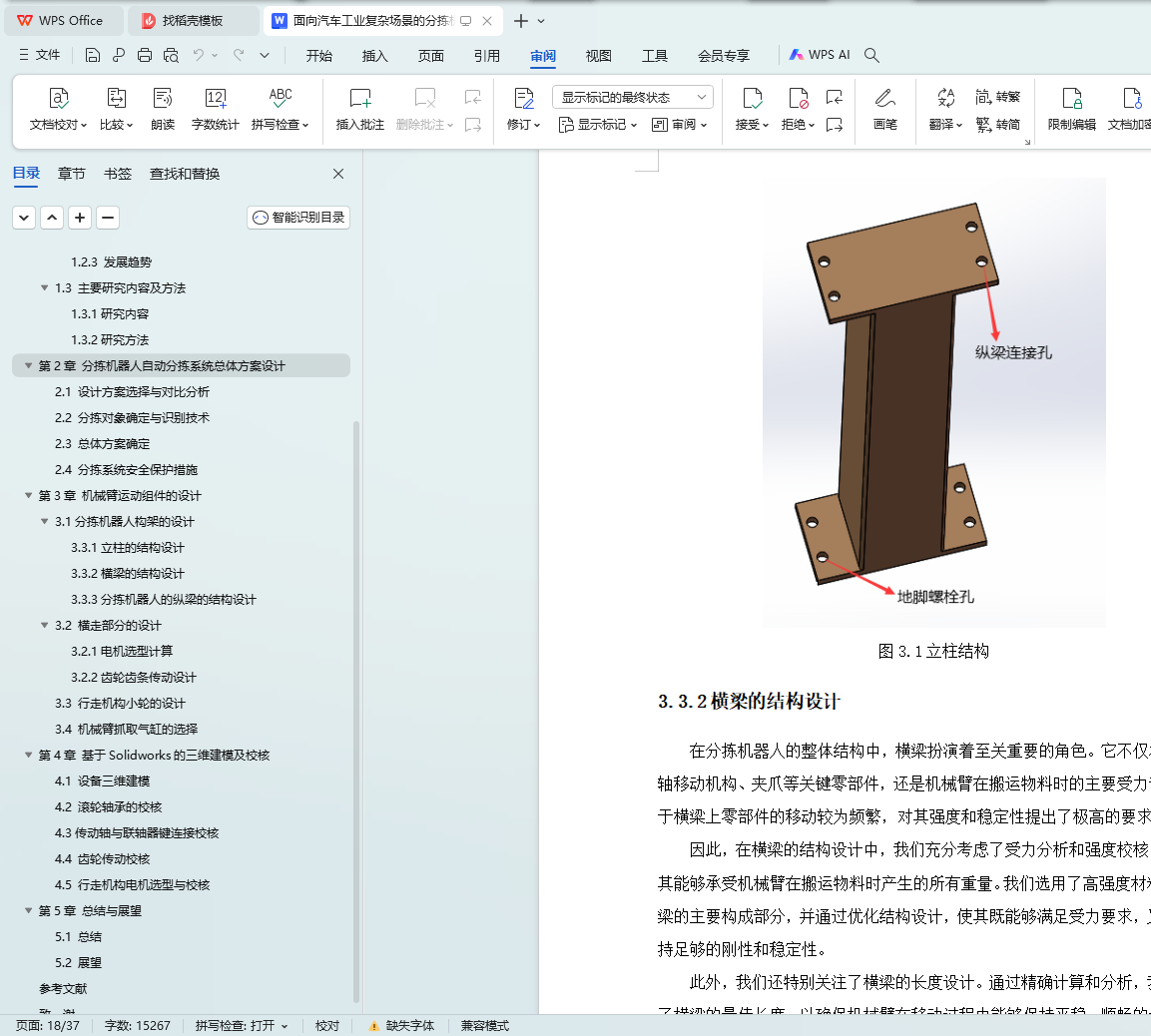
3.3.2横梁的结构设计
3.3.3分拣机器人的纵梁的结构设计
3.2 横走部分的设计
3.2.1电机选型计算
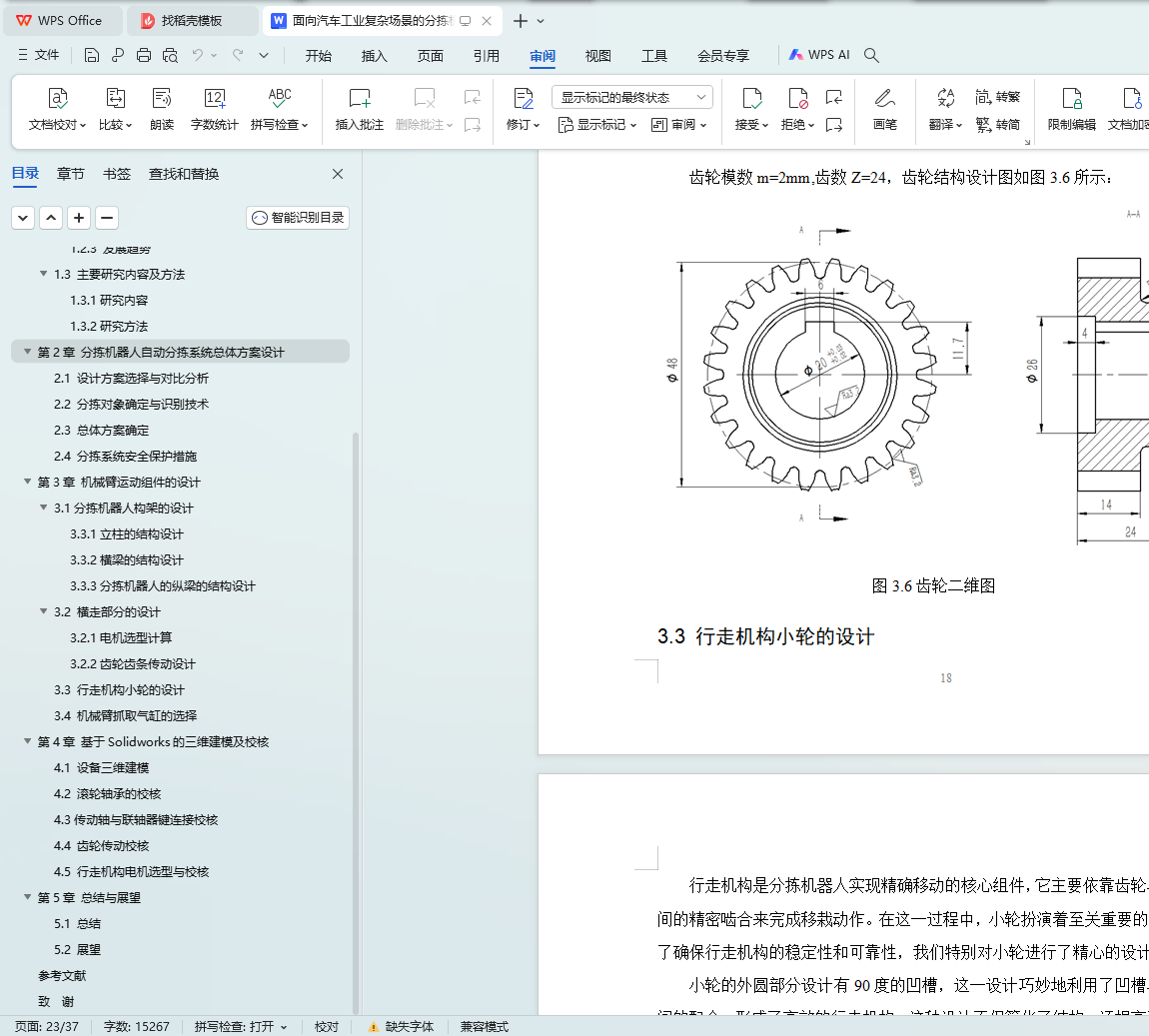
3.2.2齿轮齿条传动设计
3.3 行走机构小轮的设计
3.4 机械臂抓取气缸的选择
第4章 基于solidworks的三维建模及校核
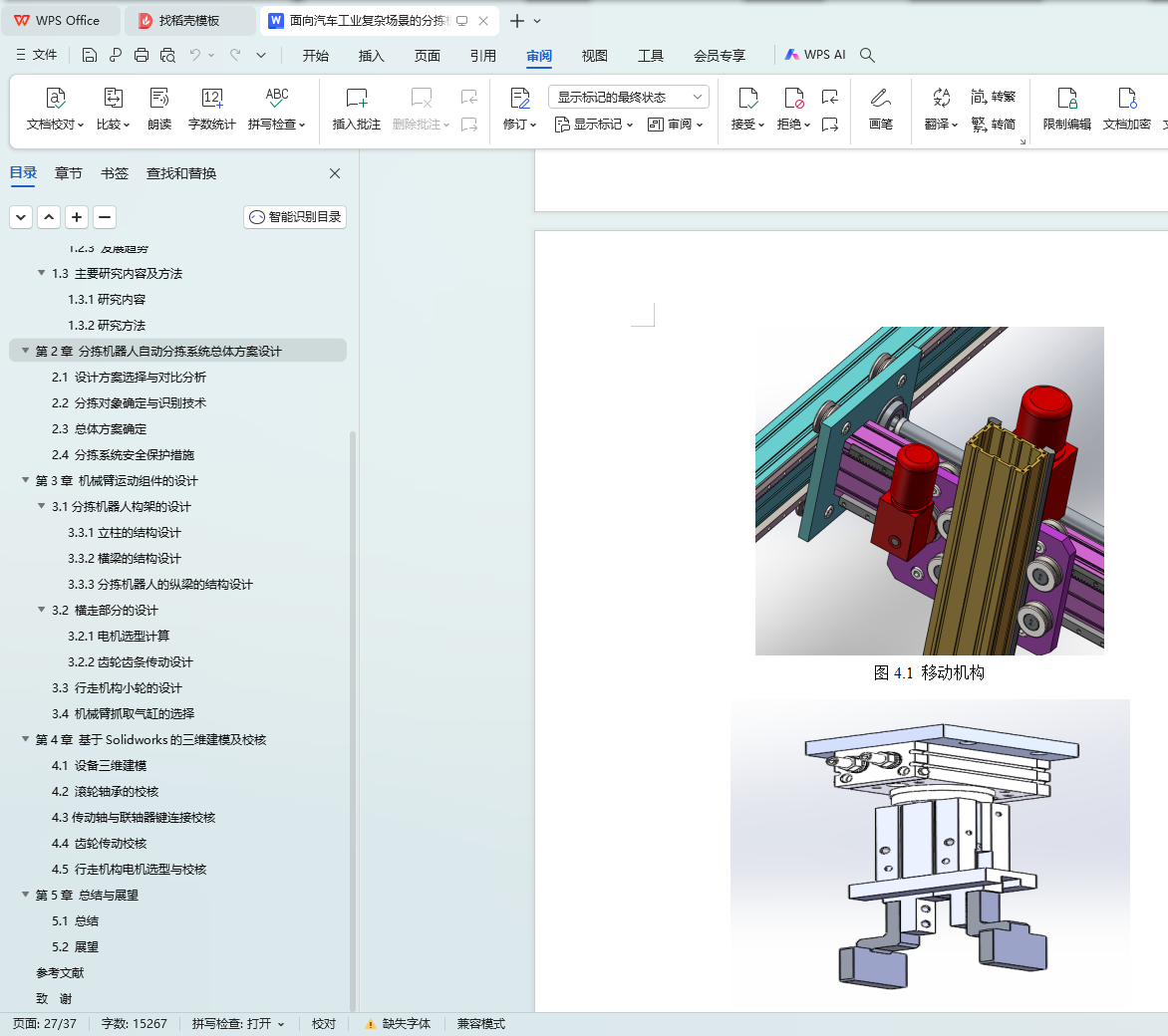
4.1 设备三维建模
4.2 滚轮轴承的校核
4.3传动轴与联轴器键连接校核
4.4 齿轮传动校核
4.5 行走机构电机选型与校核
第5章 总结与展望
5.1 总结
5.2 展望
参考文献
致 谢